Косинус фи асинхронного двигателя – – » :
Увеличение косинуса фи
Дата публикации: .
Причины низкого “косинуса фи”
Недозагрузка электродвигателей переменного тока
При недозагрузке электродвигателя потребляемая им активная мощность уменьшается пропорционально нагрузке. В то же время реактивная мощность изменяется меньше. Поэтому чем меньше нагрузка двигателя, тем с меньшим коэффициентом мощности он работает.
Так, например, асинхронный двигатель в 400 кВт при 1000 оборотах в минуту имеет “косинус фи”, равный при полной нагрузке 0,83. При ¾ нагрузки тот же двигатель имеет cos φ = 0,8. При ½ нагрузке cos φ = 0,7 и при ¼ нагрузки cos φ = 0,5.
Двигатели, работающие вхолостую, имеют “косинус фи”, равный от 0,1 до 0,3 в зависимости от типа, мощности и скорости вращения.
Неправильный выбор типа электродвигателя
Двигатели быстроходные и большой мощности имеют более высокий “косинус фи”, чем тихоходные и маломощные двигатели. Двигатели закрытого типа имеют cos φ ниже, чем двигатели открытого типа. Двигатели, неправильно выбранные по типу, мощности и скорости, понижают cos φ.
Повышение напряжения в сети
В часы малых нагрузок, обеденных перерывов и тому подобного напряжение сети на предприятии увеличивается на несколько вольт. Это ведет к увеличению намагничивающего тока индивидуальных потребителей (реактивной составляющей их полного тока), что в свою очередь вызывает уменьшение cos φ предприятия.
Неправильный ремонт двигателя
При перемотке электродвигателей обмотчики вследствие неправильного подбора проводов иногда не заполняют пазы машины тем количеством проводников, которое было в фабричной обмотке. При работе такого двигателя, вышедшего из ремонта, увеличивается магнитный поток рассеяния, что приводит к уменьшению cos φ двигателя.
При сильном износе подшипников ротор двигателя может задевать при вращении за статор. Вместо того чтобы сменить подшипники, обслуживающий персонал иногда идет по неправильному и вредному пути и подвергает ротор обточке.
Увеличение воздушного зазора между ротором и статором вызывает увеличение намагничивающего тока и уменьшение cos φ двигателя.
Способы увеличения “косинуса фи”
Вышеперечисленные последствия низкого cos φ с достаточной убедительностью говорят о том, что необходимо вести борьбу за высокий cos φ. К мерам увеличения cos φ относятся:
- Правильный выбор типа, мощности и скорости вновь устанавливаемых двигателей;
- Увеличение загрузки двигателей;
- Недопущение работы двигателей вхолостую продолжительное время;
- Правильный и высококачественный ремонт двигателей;
- Применение статических (то есть неподвижных, невращающихся) конденсаторов.
Малый вес конденсаторов, отсутствие вращающихся частей, незначительные потери энергии в них, легкость обслуживания, безопасность и надежность в работе дают возможность широкого применения статических конденсаторов для повышения cos φ двигателей.
Подбирая величину емкости при параллельном соединении и емкости, можно добиться уменьшения угла сдвига фаз между напряжением и общим током при неизменной активной и реактивной мощности, потребляемой ветвью с индуктивностью. Этот угол можно сделать равным нулю. Тогда ток, текущий на общем участке цепи, будет иметь наименьшую величину и совпадать по фазе с напряжением сети.
Это явление называется компенсацией сдвига фаз и широко используется на практике.
По экономическим соображениям невыгодно доводить угол φ до нуля, практически целесообразно иметь cos φ = 0,9 – 0,95.
Рассмотрим расчет емкости конденсаторов, которые нужно включить параллельно индуктивной нагрузке, чтобы повысить cos φ до заданной величины.
На рисунке 1, а изображена схема включения индуктивной нагрузки в сеть переменного тока. Для увеличения коэффициента мощности параллельно потребителю включена батарея конденсаторов. Векторная диаграмма начинается с построения вектора напряжения U. Ток I1 вследствие индуктивного характера нагрузки отстает по фазе от напряжения сети на угол φ1. Необходимо уменьшить угол сдвига фаз между напряжением U и общим током до величины φ. Иначе говоря, увеличить коэффициент мощности от значения cos φ1 до значения cos φ.
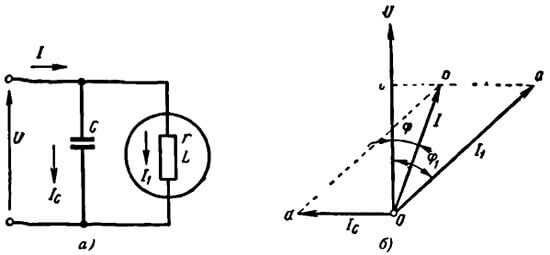
Рисунок 1. Увеличение cos φ при помощи статических конденсаторов:
а – схема включения; б – векторная диаграмма
Отрезок ос, представляющий активную слагающую тока I1, равен:
ос = I1 × cos φ1 = оа × cos φ1 .
Пользуясь выражением мощности переменного тока
P = U × I × cos φ ,
отрезок ос выразим так:
Ток на общем участке цепи I равен геометрической сумме тока нагрузки I1 и тока конденсатора IC.
Из треугольника оас и овс имеем:
ас = ос × tg φ1 ;
bс = ос × tg φ .
Из диаграммы получаем:
ab = od – ac – bc = ос × tg φ1 – ос × tg φ = oc × (tg φ1 – tg φ) .
Так как и ab = IC , то
Вместе с этим, как было указано выше,
IC = U × ω × C .
Следовательно,
Пример 1. Электрические двигатели шахты потребляют мощность 2000 кВт при напряжении 6 кВ и cos φ1 = 0,6. Требуется найти емкость конденсаторов, которую нужно подключить на шины установки, чтобы увеличить cos φ до 0,9 при f = 50 Гц.
Решение.
cos φ1 = 0,6; φ1 = 53°10’; tg φ1 = 1,335;
cos φ = 0,9; φ = 25°50’; tg φ = 0,484;
Источник: Кузнецов М. И., “Основы электротехники” – 9-е издание, исправленное – Москва: Высшая школа, 1964 – 560 с.
www.electromechanics.ru
Косинус фи – простое объяснение в 3-х словах. Таблицы коэффициента мощности для различных потребителей.
 Многие из вас наверняка видели на электроинструментах, двигателях, а также люминесцентных лампах, лампах ДРЛ, ДНАТ и других, такие надписи как косинус фи — cos ϕ.
Многие из вас наверняка видели на электроинструментах, двигателях, а также люминесцентных лампах, лампах ДРЛ, ДНАТ и других, такие надписи как косинус фи — cos ϕ.
Однако люди далекие от электротехники и позабывшие школьные уроки физики, не совсем понимают, что же означает данный параметр и зачем он вообще нужен.
Когда ток отстает от напряжения
Предположим перед вами есть 2 проводника. Один из этих проводников имеет потенциал. Не суть важно какой именно — отрицательный (минус) или положительный (плюс).
У другого провода вообще нет никакого потенциала. Соответственно между этими двумя проводниками будет разность потенциалов, т.к. у одного он есть, а у другого его нет.
Эту разность потенциалов как раз таки и принято называть напряжением.
Если вы соедините кончики двух проводов не непосредственно между собой, а через лампочку накаливания, то через ее вольфрамовую нить начнет протекать ток. От одного провода к другому.
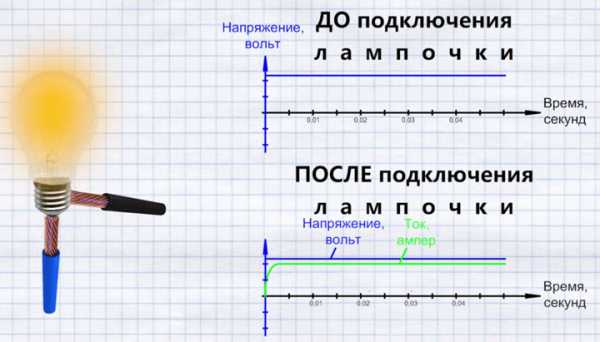
В какой-то момент он его достигает и держится на этом уровне постоянно. То же самое будет, если подключить не одну, а две, три лампочки и т.д.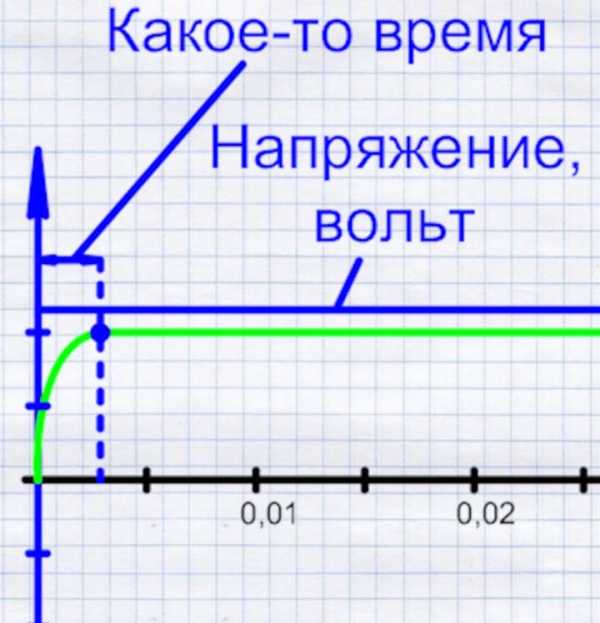
А что случится, если вместе с лампой последовательно включить катушку, намотанную из множества витков проволоки?
Изменится ли как-то процесс нарастания тока? Конечно, да.
Данная катушка индуктивности, заметно затормозит время увеличения тока от нуля до максимума. Фактически получится, что максимальное напряжение (разность потенциалов) на лампе уже есть, а вот ток поспевать за ним не будет.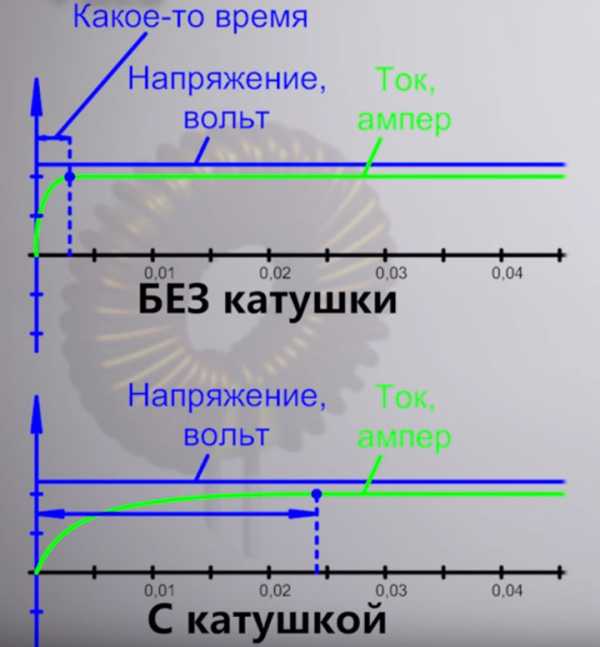
Его нарастание слишком медленное. Из-за чего это происходит и кто виноват? Виноваты витки катушки, которые оказывают влияние друг на друга и тормозят ток.
Если у вас напряжение постоянное, например как в аккумуляторах или в батарейках, ток относительно медленно, но все-таки успеет дорасти до своего номинального значения.
А далее, ток будет вместе с напряжением идти, что называется «нога в ногу».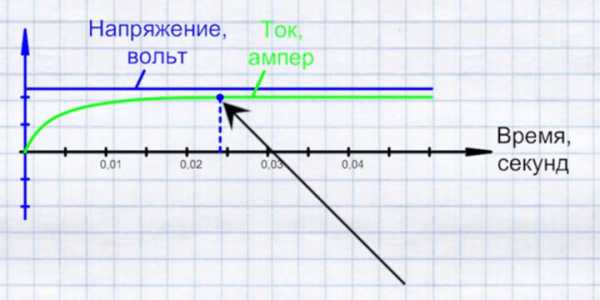
А вот если взять напряжение из розетки, с переменной синусоидой, то здесь оно не постоянно и будет меняться. Сначала U какое-то время положительная величина, а потом — отрицательная, причем одинаковое по амплитуде. На рисунке это изображается в виде волны.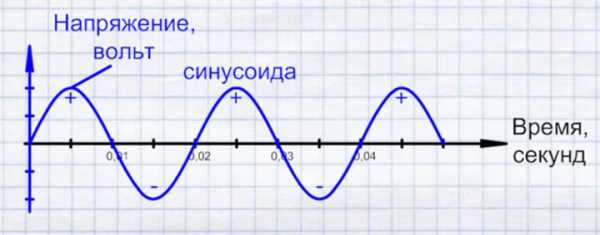
Эти постоянные колебания не дают нашему току, проходящему сквозь катушку, достигнуть своего установившегося значения и догнать таки напряжение. Только он будет подбираться к этой величине, а напряжение уже начинает падать.
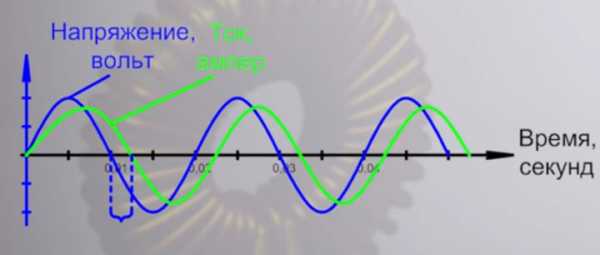
Поэтому в этом случае и говорят, что ток отстает от напряжения.
Причем, чем больше в катушке намотано витков, тем большим будет это самое запаздывание.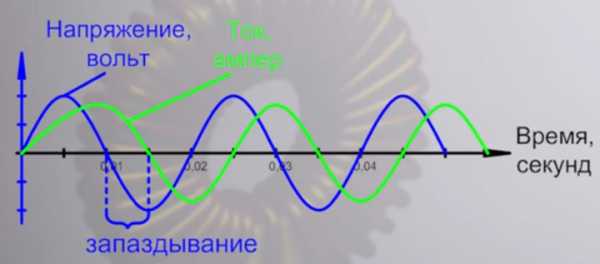
Как же это все связано с косинусом фи — cos ϕ?
Что такое коэффициент мощности
А связано это таким образом, что данное отставание тока измеряется углом поворота. Полный цикл синусоиды или волны, который она проходит от нуля до нуля, вместив в себя максимальное и минимальное значение, измеряется в градусах. И один такой цикл равен 360 градусов.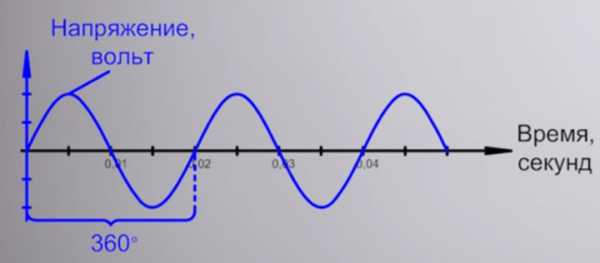
А вот угол отставания тока от напряжения, как раз таки и обозначается греческой буквой фи. Значение косинуса этого угла опаздывания и есть тот самый cos ϕ.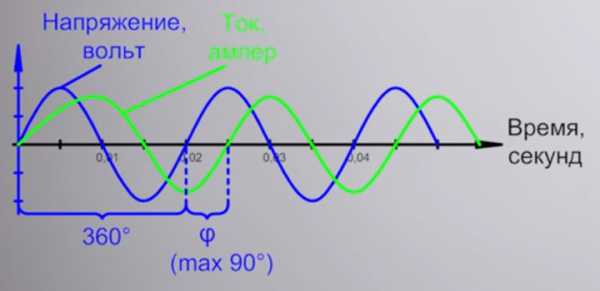
Таким образом, чем больше ток отстает от напряжения, тем большим будет этот угол. Соответственно косинус фи будет уменьшаться.
По научному, ток сдвинутый от напряжения называется фазовым сдвигом. При этом почему-то многие уверены, что синусоида всегда идеальна. Хотя это далеко не так.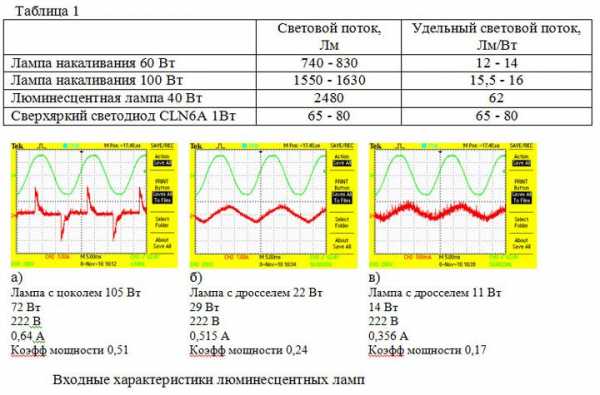
В качестве примера можно взять импульсные блоки питания.
Не идеальность синусоиды выражается коэфф. нелинейных искажений — КНИ. Если сложить две эти величины — cos ϕ и КНИ, то вы получите коэффициент мощности.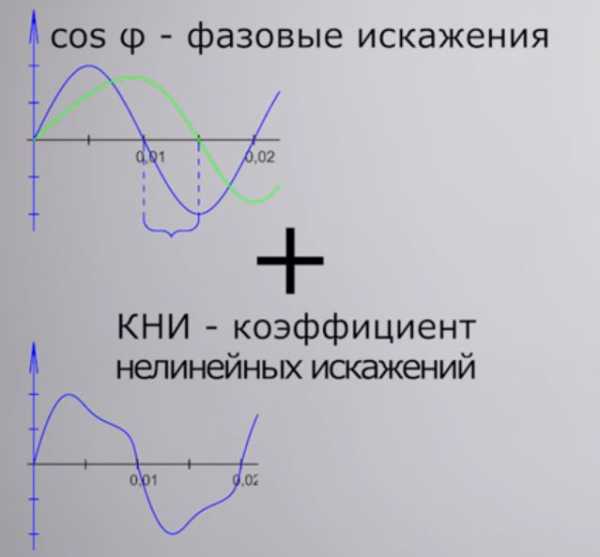
Однако, чтобы все не усложнять, чаще всего под понятием коэфф. мощности имеют в виду только лишь один косинус фи.
На практике, данный коэффициент мощности рассчитывают не при помощи угла сдвига фаз, а отношением активной мощности к полной.
Активная и реактивная мощность
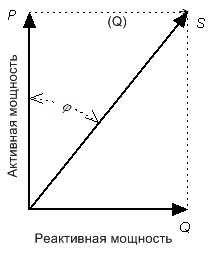
Существует такое понятие как треугольник мощностей. Сам косинус — это тригонометрическая функция, которая и появилась при изучении свойств прямоугольных треугольников.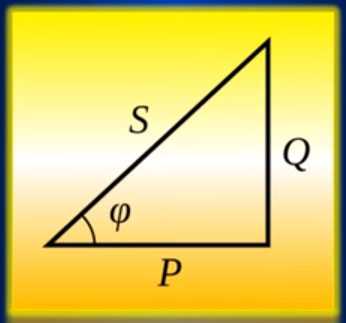
Она здорово помогает производить определенные вычисления с ними. Например, наглядно показывает отношение длин прилежащего катета (P-активная мощность) к гипотенузе (S-полная мощность).
То есть, зная угол сдвига, можно узнать, сколько активной мощности содержится в полной. Чем меньше этот угол, тем меньше реактивной составляющей находится в сети, и наоборот.
В КПД все более четко — полезная мощность используется на нагрев — охлаждение — механическую работу, остальное уходит безвозвратно. Эта разница и показывается в КПД.
Более подробно, с графиками, рисунками и простыми словами, без особых научных формулировок обо всем этом говорится в ролике ниже.
Низкий коэффициент мощности и его последствия
Рассмотренное запаздывание тока относительно напряжения — это не хорошее явление. Как оно может сказаться на ваших лампочках или проводке?
- во-первых, это повышенное потребление электроэнергии
 Часть энергии будет просто “болтаться” в катушке, при этом не принося никакой пользы. Правда не пугайтесь, ваш бытовой счетчик реактивную энергию не считает и платить вы за нее не будете.
Часть энергии будет просто “болтаться” в катушке, при этом не принося никакой пользы. Правда не пугайтесь, ваш бытовой счетчик реактивную энергию не считает и платить вы за нее не будете.
Например, если вы включите в розетку инструмент или светильник с полной мощностью 100Ва, на блоке питания которого будет указано cos ϕ=0,5. То прибор учета накрутит вам только на половину от этой величины, то есть 50Вт.
Зато по проводам питания будет проходить вся нагрузка, разогревая их бесполезной работой.
- величина тока в проводке увеличится
Вот известное наглядное видео, демонстрирующее последствия этого для проводки.
- для эл.станций и трансформаторов оно вредно перегрузкой
Казалось бы, выбрось катушку и вся проблема исчезнет. Однако делать этого нельзя.
В большинстве светильников, лампы работают не отдельно, а в паре с источниками питания. И в этих самых источниках, как раз таки присутствуют разнообразные катушки.
Катушки просто необходимы как функциональная часть всей схемы и избавиться от них не получится. Например в тех же дроссельных лампах ДРЛ, ДНАТ, люминесцентных и т.п.
Поэтому характеристика коэфф. мощности, здесь больше относится к блоку питания, нежели к самой лампе. Данный cos ϕ может принимать значение от ноля до единицы.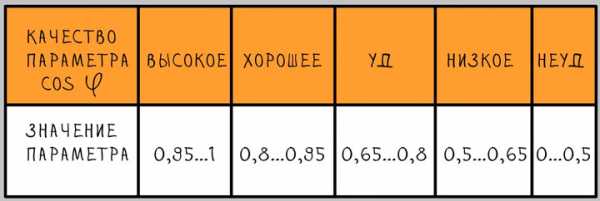
Ноль означает, что полезная работа не совершается. Единица – вся энергия идет на совершение полезной работы.
Чем выше коэффициент мощности, тем ниже потери электроэнергии. Вот таблица косинуса фи для различных потребителей: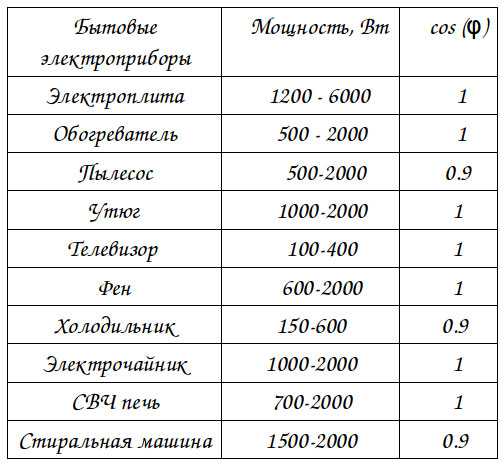

Как измерить коэффициент мощности
 Если вы не знаете точный коэфф. мощности своего прибора, или его нет на бирке, можно ли измерить косинус фи в домашних условиях, не прибегая к различным формулам и вычислениям? Конечно можно.
Если вы не знаете точный коэфф. мощности своего прибора, или его нет на бирке, можно ли измерить косинус фи в домашних условиях, не прибегая к различным формулам и вычислениям? Конечно можно.
Для этого достаточно приобрести широко распространенный инструмент – цифровой ваттметр в розетку.
Подключая любое оборудование через него, можно легко без замеров и сложных вычислений, узнать фактический cos ϕ.
Зачастую, фактические данные могут быть даже точнее, чем написанные на шильдике, которые рассчитаны для идеальных условий.
Если он слишком низкий, что делать, чтобы привести его значение как можно ближе к единице? Можно это дело определенным образом компенсировать. Например, с помощью конденсаторов.
Однако это тема совсем другой статьи.
svetosmotr.ru
Косинус фи (cos φ) или Коэффициент мощности
На шильдиках двигателей и некоторых других устройств можно видеть непонятный параметр косинус фи (cos φ). Что этот параметр означает, в данной статье коротко объясняется, что это такое.
Косинус фи (cos φ) часто называют «Коэффициент мощности». Это почти одно и то же при правильной синусоидальной форме тока.
Иногда для обозначения коэффициента мощности используется λ, эту величину выражают в процентах, или PF.
Условные обозначения
P — активная мощность S — полная мощность Q — реактивная мощность, U — напряжение I — ток.
Что такое Косинус фи (cos φ) — «Коэффициент мощности»
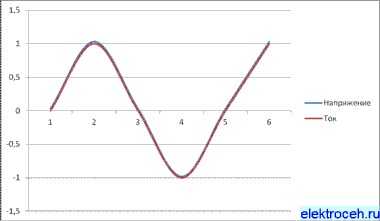
Косинус фи (cos φ) это косинус угла между фазой напряжения и фазой тока.
При активной нагрузке фаза напряжения совпадает с фазой тока, φ (между фазами) равен 0 (нулю). А как мы знаем cos0=1. То есть при активной нагрузке коэффициент мощности равен 1 или 100%.
Активная нагрузка
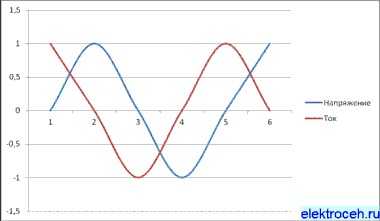
При емкостной или индуктивной нагрузке фаза тока не совпадает с фазой напряжения. Получается «сдвиг фаз».
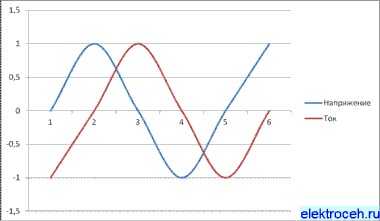
При индуктивной или активно-индуктивной нагрузке (с катушками: двигатели, дросселя, трансформаторы) фаза тока отстает от фазы напряжения.
При емкостной нагрузке (конденсатор) фаза тока опережает фазу напряжения
А почему тогда косинус фи (cos φ) это тоже самое что коэффициент мощности, да потому что S=U*I.
Посмотрите на графики ниже. Здесь φ равно 90 косинус фи (cosφ)=0(нулю).
Емкостная нагрузка
Индуктивная нагрузка
Попытаемся вычислить мощность для простоты возьмем максимальное значение напряжения равное 1(100%) в этот момент ток равен 0(нулю) соответственно их произведение, то есть мощность равны 0(нулю). И наоборот когда ток максимальный напряжение равно нулю.
Получается что полезная, активная мощность равна 0(нулю).
Коэффициент мощности это соотношение полезной активной мощности к полной мощности, то есть cosφ=P/S.
Треугольник мощностей
Посмотрите на треугольник мощностей. Вспомним тригонометрию (это что то из математики) вот здесь то она нам и пригодится.
P=U x I x cos φ
Q =U x I x sin φ
На практике. Если подключить асинхронный двигатель в сеть без нагрузки, в холостую. Напряжение вроде как есть, ток, если замерить тоже есть, при этом ни какой полезной работы не совершается. Соответственно активная мощность минимальна.
Если на двигателе увеличить нагрузку то сдвиг фаз начнет уменьшаться и соответственно косинус фи (cos φ) будет увеличиваться, а с ним и активная мощность.
К счастью счетчики активной мощности фиксируют соответственно только активную мощность. И нам не приходится переплачивать за полную мощность.
Однако у реактивной мощности есть большой минус она создает бесполезную нагрузку на электрическую сеть из-за этого образуются потери.
www.elektroceh.ru
Коэффициент мощности (cos φ, косинус фи ), Полная (кажущаяся), активная и реактивная мощность электродвигателя=электромотора и не только его. Коэффициент мощности для трехфазного электродвигателя.
Коэффициент мощности (cos φ, косинус фи ), Полная (кажущаяся), активная и реактивная мощность электродвигателя=электромотора и не только его. Коэффициент мощности для трехфазного электродвигателя.
На шильдиках многих электромоторов (электродвигателей и др. устройств) указывают активную мощность в Вт и cosφ / или λ /или PF. Что тут к чему см. ниже.
Подразумеваем,что переменное напряжение в сети синусоидальное – обычное, хотя все рассуждения ниже верны и для всех гармоник по отдельности других периодических напряжений.
Полная, или кажущаяся мощность S (apparent power) измеряется в вольт-амперах (ВА или VA) и определяется произведением переменных напряжения и тока системы. Удобно считать, что полная мощность в цепи переменного тока выражается комплексным числом таким, что активная мощность является его действительной частью, реактивная мощность — мнимой.
 |
|
Активная мощность P (active power = real power =true power) измеряется в ваттах (Вт, W) и это та мощность, которая потребляется электрическим сопротивлением системы на тепло и полезную работу. Для сетей переменного тока:
- P=U*I*cosφ, где U и I – действующие=эффективные=среднеквадратичные значения напряжения и тока, а φ- сдвиг фаз между ними
Реактивная мощность Q (reactive power) измеряется в вольт-амперах реактивных (вар, var) и это электромагнитная мощность, которая запасается и отдается обратно в сеть колебательным контуром системы. Реактивная мощность в идеале не выполняет работы, т.е. название вводит в заблуждение. Легко догадаться глядя на рисунок, что:
- P=U*I*sinφ, где U и I – действующие=эффективные=среднеквадратичные значения напряжения и тока, а φ- сдвиг фаз между ними
Сама концепция активной и реактивной мощности актуальна для устройств (приемников) переменного тока. Она малоактуальна=никогда не упоминатеся для приемников постоянного тока в силу малости (мизерности) соответствующих эффектов, связанных только с переходными процессами при включении/выключении.
Любая система, как известно, имеет емкость и индуктивность = является неким колебательным контуром. Переменный ток в одной фазе накачивает электромагнитное поле этого контура энергией а в противоположной фазе эта энергия уходит обратно в генератор ( в сеть). Это вызывает в РФ 3 проблемы (для поставщика энергии!)
- Хотя теоретически, при нулевых сопротивлениях передачи, на выработку реактивной мощности не тратится мощность генератора, но практически для передачи реактивной мощности по сети требуется дополнительная, активная мощность генератора (потери передачи).
- Сеть должна пропускать и активные и реактивные токи, т.е иметь запас по пропускным характеристикам.
- Генератор мог бы, выдавая те же ток и напряжение, поставлять потребителю электроэнергии больше активной мощности.
попробуем догадаться, что делает поставщик электроэнергии? Правильно, пытается навязать Вам различные тарифы для разлиных значений cos φ. Что можно сделать: можно заказать компенсацию реактивной мощности ( т.е. установку неких блоков конденсаторов или катушек), которые заставят реактивную нагрузку колебаться внутри Вашего предприятия/устройства. Стоит ли это делать? Зависит от стоимости установки, наценок за коэффициент мощности и очень даже часто не имеет экономического смысла. В некоторых странах качество питающего напряжения тоже может пострадать от избытка реактивной мощности, но в РФ проблема неактуальна в силу изначально очень низкго качества в питающей сети.
Естественно, хотелось бы ввести величину, которая характеризовала бы степень линейности нагрузки. И такая величина вводится под названием коэффициент мощности (“косинус фи”, power factor, PF), как отношение активной мощности к полной, естественно сразу в 2-х видах, в РФ это:
- λ=P/S*100% – то есть, если в %, то это лямбда, P в (Вт), S в (ВА)
- cosφ=P/S – более распространенная величина , P в (Вт), S в (ВА)
Коэффициент мощности для трехфазного асинхронного (обычного) электродвигателя.
cosφ = P / (√3*U*I)
где
cosφ = косинус фи
√3 = квадратный корень из трех
P = активная мощность (Вт)
U = Напряжение (В)
I = Ток (А)
tehtab.ru
cosφ | Советы электрика
Мне много приходит писем от моих читателей и посетителей сайта, спрашивают совета, интересуются как лучше поступить в том или ином случае когда возникают затруднения в электрике для дома.
Частенько задают вопросы и по теории электротехники. Я конечно не профессор и досконально всего не знаю по теории, но в свое время у меня были хорошие преподователи по ТОЭ и хорошо “вдолбили” мне базовые знания, да я особо и не сопротивлялся)))
Поэтому на несложные вопросы могу ответить что и делаю сейчас.
В одном из писем меня спрашивают: “Почему у ассинхронного двигателя на холостом ходу низкий косинус фи?”
Отвечаю:
Потому что вся энергия, которую двигатель забирает из сети расходуется на 99% на создание магнитного поля внутри движка- намагничивание статора, создание вращающегося магнитного поля, в роторе наводится ЭДС, происходит сцепление двух магнитных полей и т.д.
Это- реактивная энергия.
Вспомним формулу косинуса фи:
По сути косинус фи (cosφ) служит показателем потребления реактивной энергии.
Сosφ показывает соотношение активной мощности к полной.
Если активная энергия (Р) расходуется на создание полезной работы, например электродвигатель приводит в движение вал токарного станка, то реактивная энергия (Q) расходуется только на создание магнитного поля.
На холостом ходу значение полезной (активной) мощности близко к нулю, а следовательно и значение косинуса фи- минимальное.
В номинальном режиме работы электродвигателя, когда к его валу подключена соответствующая наргузка, его cosφ=0,75÷0,95.
На холостом ходу- cosφ=0,08÷0,15
Поэтому и выбирают электродвигатель так, что бы он соответствовал мощности нагрузки, иначе КПД у двигателя будет низким и cosφ тоже, что приводит к излишним тратам электроэнергии.
Приведу пример: никто не будет подключать на бытовой наждак трехфазный двигатель мощностью 30 кВт если можно обойтись движком на 1-1,5кВт.
Если это сделать то такой мощный двигатель будет работать вхолостую и потреблять при этом большой ток на создание электромагнитного поля. При этом он будет зря нагружать сеть питания реактивным током, что в свою очередь приводит к увеличению потерь в проводах линии ВЛ.
Поэтому cosφ у электродвигателя должен быть максимальным.
Узнайте первым о новых материалах сайта!
Просто заполни форму:
ceshka.ru
Косинус фи в электротехнике – это коэффициент можности
На бирках (шильдиках) электродвигателей обязательно указана его мощность, измеряемая в ваттах, и вот такой значок «cosφ». Что обозначает косинус фи в электротехнике – это коэффициент мощности. И определяется он соотношением мощности активной к полной. При этом чем выше данный коэффициент, то есть приближается к единице, тем лучше. Потому что в данном случае реактивная мощность будет равна нулю, а, значит, будет уменьшаться потребляемое значение, что приведет к экономии электроэнергии.
Поэтому чтобы разобраться в косинусе фи, необходимо сначала разобраться со всеми этими мощностями.
Мощности в электродвигателе
Итак, полная мощность с единицей измерения вольт-ампер (ВА) – это комплексная величина, состоящая из активной мощности (действительной) и реактивной (мнимой). Если рассматривать полный показатель по формуле, то можно это отобразить вот так:
N=√Nа²+Nр²
Или вот так:
N=IxU.
Теперь рассмотрим составляющие первой формулы. Активная мощность действует только на активных сопротивлениях, то есть она присутствует при определенных нагрузках, а, точнее сказать, когда электрический двигатель работает. Вычисляется она вот по этой формуле:
Nа=IxUxcosφ.
Что значит активное сопротивление? Здесь необходимо понимать, что в цепях переменного тока сопротивление выше, чем в цепях постоянного тока. Это связано со многими факторами. К примеру, это вихревые токи, которые образуются в цепи, это электромагнитное поле, это близость расположения проводников и так далее. Именно поэтому сопротивление в сетях переменного тока называют активным, а в сетях постоянного тока омическим.
Теперь, что касается реактивной мощностной составляющей. Во-первых, эта величина измеряется в вольт ампер реактивный (вар). Во-вторых, это своеобразная накопительная мощность, которая накапливается в проводниковых сетях, а потом отдается обратно в сеть. Кстати, эта величина может быть положительной или отрицательной.
Причинами появления реактивной составляющей могут быть приборы, которые выдают емкостную или индуктивную нагрузку. Рассчитывают этот показатель вот по этой формуле:
Nр=IxUx sinφ.
Если рассматривать полезность реактивной мощности, то она не расходуется на прямые нужды потребителя. К примеру, в электрических двигателях она не преобразуется из электрической в механическую. И хотя полезной нагрузки эта мощность не несет, без нее не может быть осуществлена полезная работа. И все же производители стараются данный показатель уменьшить, потому что повышение активной составляющей приводит к снижению реактивной, отсюда и низкий КПД оборудования или сети.
Косинус фи
Как уже было сказано выше, значение косинуса фи в электротехнике – это величина, характеризующая степень линейности нагрузки. Для нее тоже существует формула:
cosφ = Nа / (√3*U*I).
Что касается величины «cosφ», то ее увеличение преследует несколько целей.
- Основная цель – экономия потребления электрического тока.
- Соответственно экономия цветных металлов, которые используются в обмотках электромотора.
- Максимальное использование полезной мощности агрегата.
Хотелось бы отметить вот какой момент – производственные электрические сети всегда находятся в недогруженном состоянии. Почему? Все дело в том, что не все электродвигатели постоянно работают под нагрузкой. Любой асинхронный двигатель на холостом ходе имеет косинус фи, равный приблизительно значению 0,2. При нагрузке косинус фи увеличивается до 0,85. Почему так происходит? Все опять упирается в активную и реактивную мощности. Первая при холостом ходе мотора приблизительно составляет 30%, вторая 15%. Как только нагрузка на электрический двигатель увеличивается, тут же поднимается активная составляющая, а реактивная снижается практически до нуля. Поэтому основное требование увеличения «cosφ» – это работа предприятия с полной нагрузкой.
Мероприятия по увеличению косинуса фи
Чтобы увеличить косинус фи, можно воспользоваться двумя способами:
- Естественным путем без установки компенсирующих приборов и устройств.
- Искусственным путем с установкой компенсирующих агрегатов.
В первом случае необходимо использовать мероприятия, с помощью которых регулируются технологические процессы. Таким методом добивается оптимальный режим расходования потребляемой электроэнергии. Ко вторым, к примеру, можно отнести замену асинхронных электродвигателей синхронными, в которых реактивная мощность практически равна нулю. Она присутствует, но только на стадии запуска мотора.
onlineelektrik.ru
Электротехника и электроника для заочников / K00K25ER
Л Е К Ц И Я 25
1. Энергетическая диаграмма и коэффициент полезного действия асинхронного двигателя.
2. Коэффициент мощности асинхронного двигателя.
3. Рабочие характеристики асинхронного двигателя.
4. Пуск и регулирование скорости вращения.
1. Энергетическая диаграмма и коэффициент полезного действия
асинхронного двигателя.
Рассмотрим асинхронный двигатель, на валу которого имеется нагрузка и обмотка статора которого потребляет из сети электроэнергию мощностью .
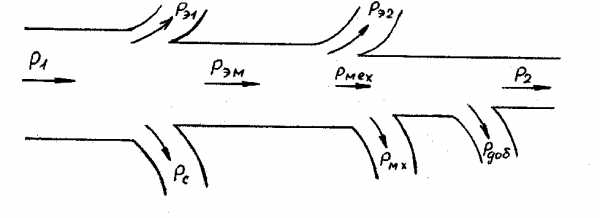
На энергетической диаграмме представлено распределение энергии при работе асинхронного двигателя.
Часть мощности теряется в статоре на потери в проводниках обмотки и потери на гистерезис и вихревые токи в стали сердечника Pc. ставшаяся часть электрической мощности посредством вращающегося
магнитного потока передается со статора на ротор:
электромагнитная мощность
Электромагнитная мощность Рэм определяется током и ЭДС ротора. Часть мощности Рэм теряется в проводниках обмотки Рэ . Оставшаяся часть мощности преобразуется в механическую мощность Рмех, под действием которой ротор асинхронного двигателя вращается. Часть механической мощности Рмех теряется на трение в подшипниках, на вентиляцию и т.д. и являются механическими потерями Рмх. Другая часть мощности теряется из-за рассеяния магнитного поля в зубьях статора и ротора и является добавочными потерями Рдоб.
Таким образом, полезная механическая мощность на валу двигателя
Эта мощность указывается в паспортных данных асинхронного двигателя. Коэффициент полезного действия (кпд) двигателя определяется
Двигатели малой и средней мощности имеют номинальный кпд в пределах 0,7 – 0,9, двигатели большой мощности имеют кпд 0,94 – 0,96.
2. Коэффициент мощности асинхронного двигателя.
Наряду с расходом активной энергии на валу двигателя и в самой машине часть энергии, реактивной, периодически возвращается в сеть. Эта часть энергии характеризуется реактивной мощностью Q1 . Коэффициент мощности двигателя равен
Он зависит от момента нагрузки на валу двигателя. При холостом ходе коэффициент мощности
cos = 0,08 – 0,15. С возрастанием нагрузки
активная мощность увеличивается,
возрастает и cos
= 0,08 – 0,15. С возрастанием нагрузки
активная мощность увеличивается,
возрастает и cos до 0,75 – 0,95. С дальнейшим возрастанием
нагрузки существенно увеличиваются
токи статора и ротора, и возрастает
реактивная мощность рассеяния. Cos
до 0,75 – 0,95. С дальнейшим возрастанием
нагрузки существенно увеличиваются
токи статора и ротора, и возрастает
реактивная мощность рассеяния. Cos  постепенно уменьшается.
постепенно уменьшается.
3. Рабочие характеристики асинхронного двигателя.
Механическая характеристика.
Зависимость скорости вращения ротора двигателя от момента, развиваемого им, называется механической характеристикой двигателя
n = f (Mэм)
,  =
f (Mэм)
,
=
f (Mэм)
,
где Мэм – электромагнитный момент, действующий на ротор.
Механической характеристикой является также зависимость S= f(Мэм).
В установившемся режиме Mэм = М, где М – момент на валу.
Известно, что момент можно представить:

Мощность Рэ2 можно выразить через ток I2, который легко определяется из схемы замещения. После подстановки получим подобной трансформатору

Из формулы видно, что с возрастанием скольжения S момент вначале возрастает и далее уменьшается. Максимальное значение момента соответствует критическому скольжению Sкр. Приближенно, при можно считать:
где – реактивное сопротивление потока рассеяния.
Для практических целей удобно пользоваться другой формулой момента:
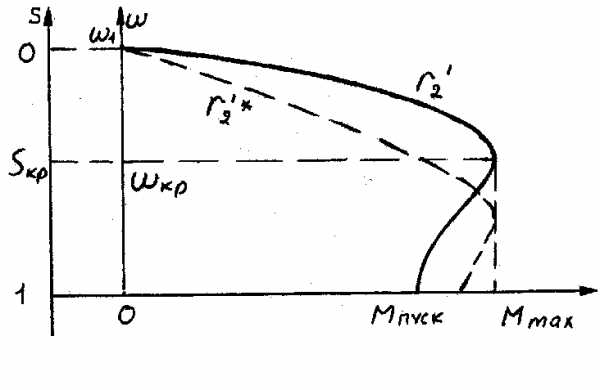
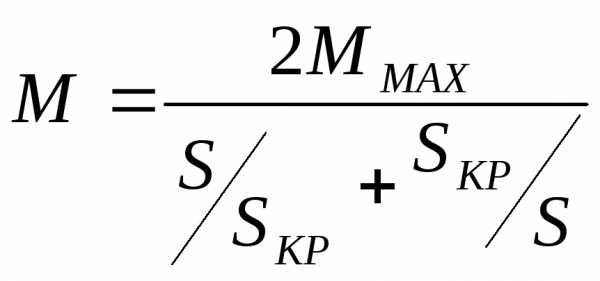
где Мmax – максимальное значение момента.
Из
формулы видно, что с изменением  изменяется ход механической характеристики.
Она, например, смещается вниз с увеличением
изменяется ход механической характеристики.
Она, например, смещается вниз с увеличением  .
.
Зависимости n, S, M, cos и
и  =
f(P2)
при U1= Uном = const, f = const ,представленные на рис. , являются
рабочими характеристиками асинхронного
двигателя.
=
f(P2)
при U1= Uном = const, f = const ,представленные на рис. , являются
рабочими характеристиками асинхронного
двигателя.
К
рабочим характеристикам относят также
зависимость I1=
f(P2).
Зависимость n=f(P2)
или S=f(P2)
называется скоростной характеристикой.
На холостом ходу, т.е. при Р2 =0,
ротор вращается со скоростью .
С
увеличением мощности нагрузки
.
С
увеличением мощности нагрузки
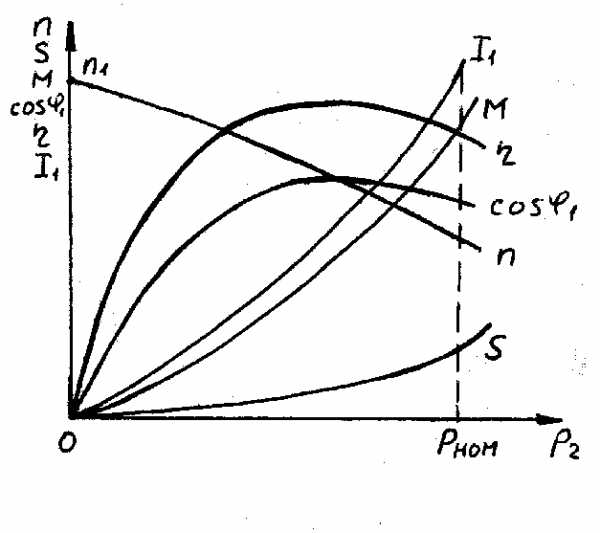
Рис.
скорость вращения n уменьшается, а скольжение S растет.
Зависимость M = f(P ) называется моментной характеристикой. При отсутствии нагрузки к валу двигателя приложен небольшой момент на преодоление сил трения. Поэтому при Р2 = 0 М = Мтр. С возрастанием Р кпд вначале возрастает, а в дальнейшем уменьшается, так как при больших токах статора и ротора мощность электрических потерь, пропорциональная квадрату токов, возрастает быстрее мощности P2 .
Так
как при холостом ходе I1 = I0 и его основной составляющей является
намагничивающая составляющая, совпадающая
по фазе с магнитным потоком, cos асинхронных двигателей довольно низок
– примерно 0,2. С увеличением нагрузки
ток статора все в большей степени
определяется активной составляющей
тока ротора и cos увеличивается. При
больших мощностях увеличивается мощность
рассеяния.
асинхронных двигателей довольно низок
– примерно 0,2. С увеличением нагрузки
ток статора все в большей степени
определяется активной составляющей
тока ротора и cos увеличивается. При
больших мощностях увеличивается мощность
рассеяния.
4. Пуск и регулирование скорости вращения.
В момент пуска частота вращения n = 0, а скольжение S = 1. Поэтому имеет место бросок пускового тока, который в 5-6 раз больше номинального. Для снижения пускового тока используют пусковые реостаты в двигателях с фазным ротором или понижают на период пуска напряжение, подводимое к статору. Пуск с помощью пускового реостата осуществляют только для двигателей с фазным ротором. К обмотке каждой фазы ротора через контактные кольца подключен пусковой реостат.
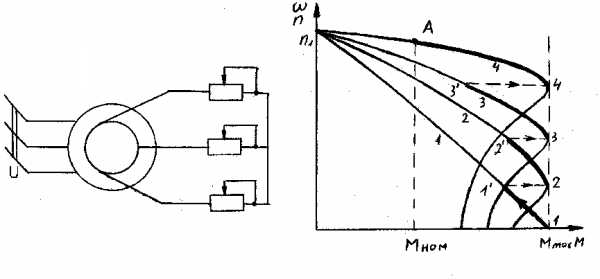
Рис.35
При
включении пускового реостата, имеющего
максимальное сопротивление, двигатель
трогается с места при Мп = Мmax (характеристика I на рис. ). После того,
как ротор приходит во вращение, его
момент начинает уменьшаться (точка 1′
). Сопротивление пускового реостата
уменьшают, что приводит к переходу
рабочей точки на новую характеристику
(точка 2) Таким образом, с вводом реостата
рабочая точка механической характеристики
перемещается по ломаной 1 – 1′
– 2 – 2′
– 3 – 3′
– . . . . и т. д. пока не выйдет по
естественной ветви при сопротивлении
реостата, равном нулю, в номинальный
режим ( точка А, рис. ). Пуск при
пониженном напряжении применяют для
двигателей с короткозамкнутым ротором.
Так как вращающий момент пропорционален
квадрату напряжения, такой способ пуска
применим только при отсутствии нагрузки
на валу двигателя. В нормальном
режиме обмотки статора двигателя
соединены треугольником. При пуске
обмотки соединяют звездой, что приводит
к уменьшению напряжения на обмотке в  раз.
Во столько же раз уменьшается и фазный
ток в обмотке статора. Так как при
соединении звездой Iл = Iф,
а при
раз.
Во столько же раз уменьшается и фазный
ток в обмотке статора. Так как при
соединении звездой Iл = Iф,
а при
соединении
треугольником он больше фазного в  раз, то при переключении обмоток
двигателя на звезду линейный ток
уменьшается в три раза. После разгона
двигателя обмотку статора переключают
на треугольник. Скорость вращения
асинхронного двигателя можно регулировать
следующими способами:
раз, то при переключении обмоток
двигателя на звезду линейный ток
уменьшается в три раза. После разгона
двигателя обмотку статора переключают
на треугольник. Скорость вращения
асинхронного двигателя можно регулировать
следующими способами:
1 – включение добавочных сопротивлений в цепь ротора (для двигателей с фазным ротором).
С увеличением сопротивления скорость вращения ротора уменьшается.
Достоинства: возможность плавного регулирования скорости.
Недостатки: а) дополнительные потери в роторе,
б) уменьшается жесткость механической характеристики,
т.е. увеличивается ее наклон на рабочем участке.
2 – изменением числа пар полюсов (переключением статорных обмоток)
Этим добиваются изменения скорости вращения магнитного поля.
Достоинства: не вызывает дополнительных потерь, т.е. не снижает кпд двигателя.
Недостатки: а) ступенчатое изменение скорости,
б) увеличение веса и габаритов двигателя.
3 – регулирование частоты питающего напряжения.
Этим способом достигается возможность плавного регулирования скорости двигателя и в то же время не сопровождается дополнительными потерями, т.е. соединяет в себе достоинства 1-го и 2-го методов. Недостатки: применение сложного и дорогостоящего оборудования. Данный метод наиболее перспективный. Обычно используется в асинхронных двигателях с короткозамкнутым ротором.
studfiles.net